Home > CC3 > Chapter 9 > Lesson 9.1.1 > Problem 9-8
9-8.
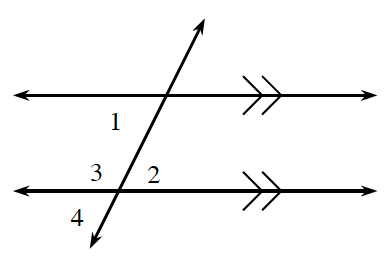
Use the conjectures and definitions in this lesson to solve parts (a) and (b). Each part is a separate problem.
If
, find and by calculation. Angle 1 and angle 2 are alternate interior angles.
When the lines are parallel, alternate interior angles have equal measures.
If
and , write an equation and find . Disregard your calculations for angle measure from part (a).
If
and , write an equation to find . Then find . Since the lines are parallel, angles 1 and 2 have equal measure.